This project focuses on the creation of an environment that elicits sadness, with the ability to manipulate the amount of interaction between the participant and the environment, as well as the use of Artificial Intelligence that reacts to the participant’s actions by dynamically altering its behavior. The environment was able to manipulate the amount of interaction that occurred successfully with few flaws in how it was executed, and the artificial intelligence was believable and dynamic but was not successful in having enough variation in the behaviors. Our results indicate that the environment is suitable for use in future iterations, but that the artificial intelligence would need to be reworked if variation in behaviors should be the focus.
The previous VE contained four scenes, namely: A Hand Selection scene where they would select their predominant hand; A Pet Store scene where they would choose their pet; A Park scene where they would throw a ball for the dog before it gets hit by a car; And a Vet scene where they are told their pet has died. The user was invisible in the sense that they could not see any element or part of themselves throughout the experience.
The interactions in the scenes can be broken down as follows: In the pet store scene, the participant has the simple method of selecting the puppy as their pet, in the park scene they can use the throw stick to throw the ball, and in the vet scene they can take the tennis ball from the vet. The AI from the previous environment was involved running and after the ball and barking when it is thrown, fetching the ball, running to its death spot and some idle animations when left alone.
 Figure 1: Choose puppy
Figure 1: Choose puppy
 Figure 2: The vet
Figure 2: The vet
A new simple scene was incorporated to allow the selection of the interaction level between 3 levels and a tutorial scene was implemented to allow the participant to get familiar with the environment controls. After the tutorial instructions, the participant can change the hand models to better suit their own. The Artificial intelligence is implemented through the use of an AI Director and the Dog Personalities.
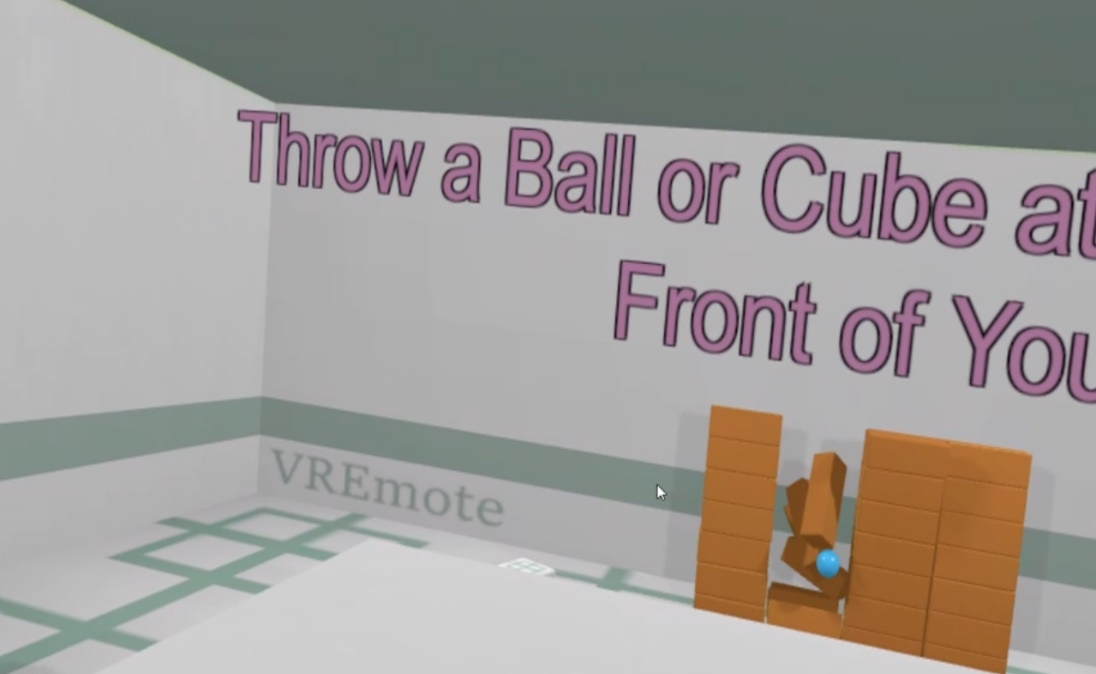 Figure 3: The tutorial scene
Figure 3: The tutorial scene
 Figure 4: The park scene
Figure 4: The park scene
Level 0: Base Level. Addition of hand models that don’t pass through objects and provide haptic feedback; The removal of the selection of the puppy, instead, having only one dog present in the pet store; And the removal of the tennis ball at the vet.
Level 1: Mid-Level. Re-adding the selection of the puppy and the ball being handed to the user in the vet; Navigation through teleportation in the park; Multiple objects to interact with apart from the tennis ball; The dog fetching objects as it explores.
Level 2: Advanced level. Hand gestures to call the dog over or to make it sit; Stroking the dog – and it reacting; A butterfly interaction where the dog leads the user to a flower grove full of butterflies; Stroking the dog after the accident; And being handed the teddy bear at the vet.
The AI Director. The AI Director primarily reacts to the participants actions, or more precisely, the lack of them. Based on the number of interactions or the different types of interactions that have occurred, it triggers events or behaviors in the dog to try and cause more interaction. Essentially, it makes changes to ensure that the pacing of the narrative is as desired and that a conducive bonding experience occurs.
Dog Personality AI. The dogs were given a sense of personality with differences in behavior between each as well as more realistic behavior. This was done by making use of a state machine with the decisions between these states as well as the within them using emotional behavior decision trees. These work the same way as a decision trees, but with the probabilities of the dog to take certain actions being dependent on specific “emotion” values of the pet: Curiosity, Playfulness, Obedience, and Bond. A higher value making it more likely to do certain activities. These values are altered through some of the interactions and allow for the variation in personality as well as more dynamic behavior changes based on how the pet is treated.
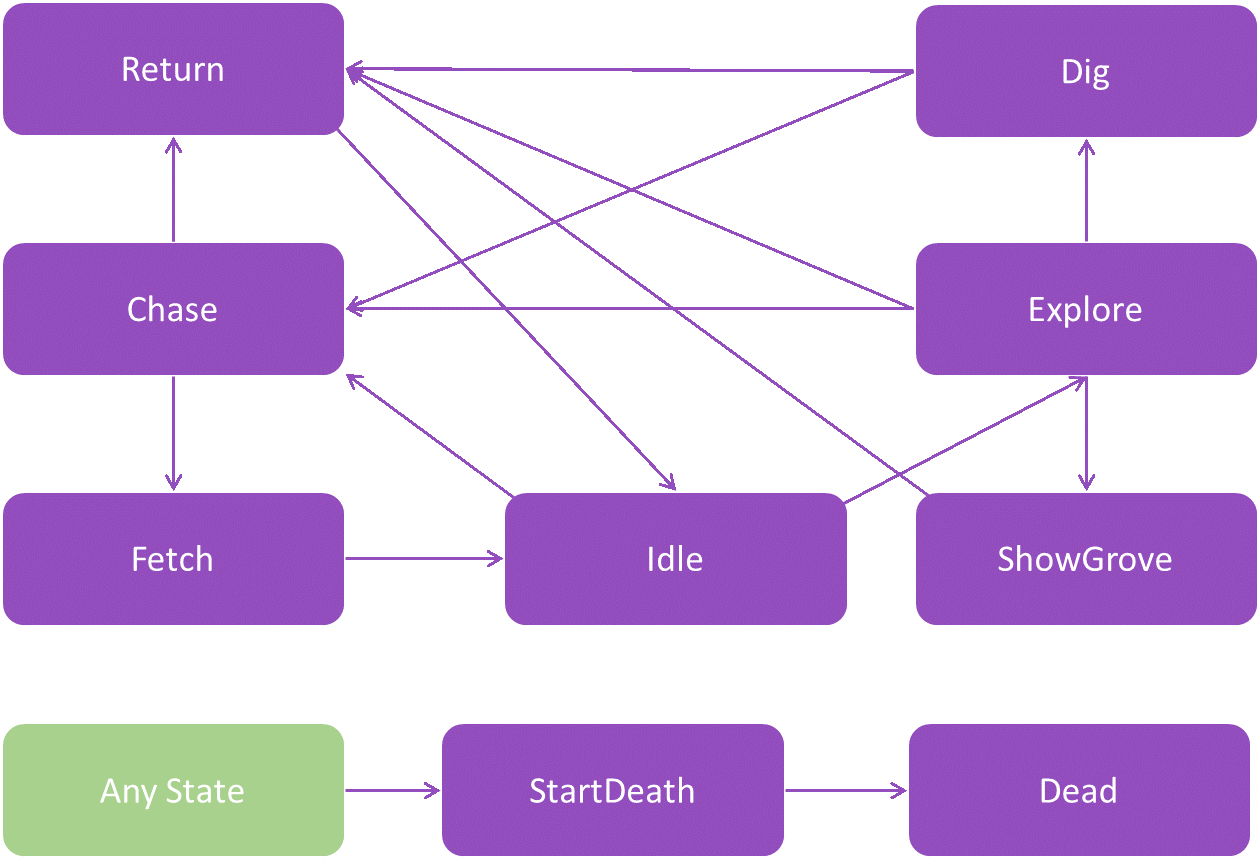 Figure 5: Dog behavioural state diagram
Figure 5: Dog behavioural state diagram
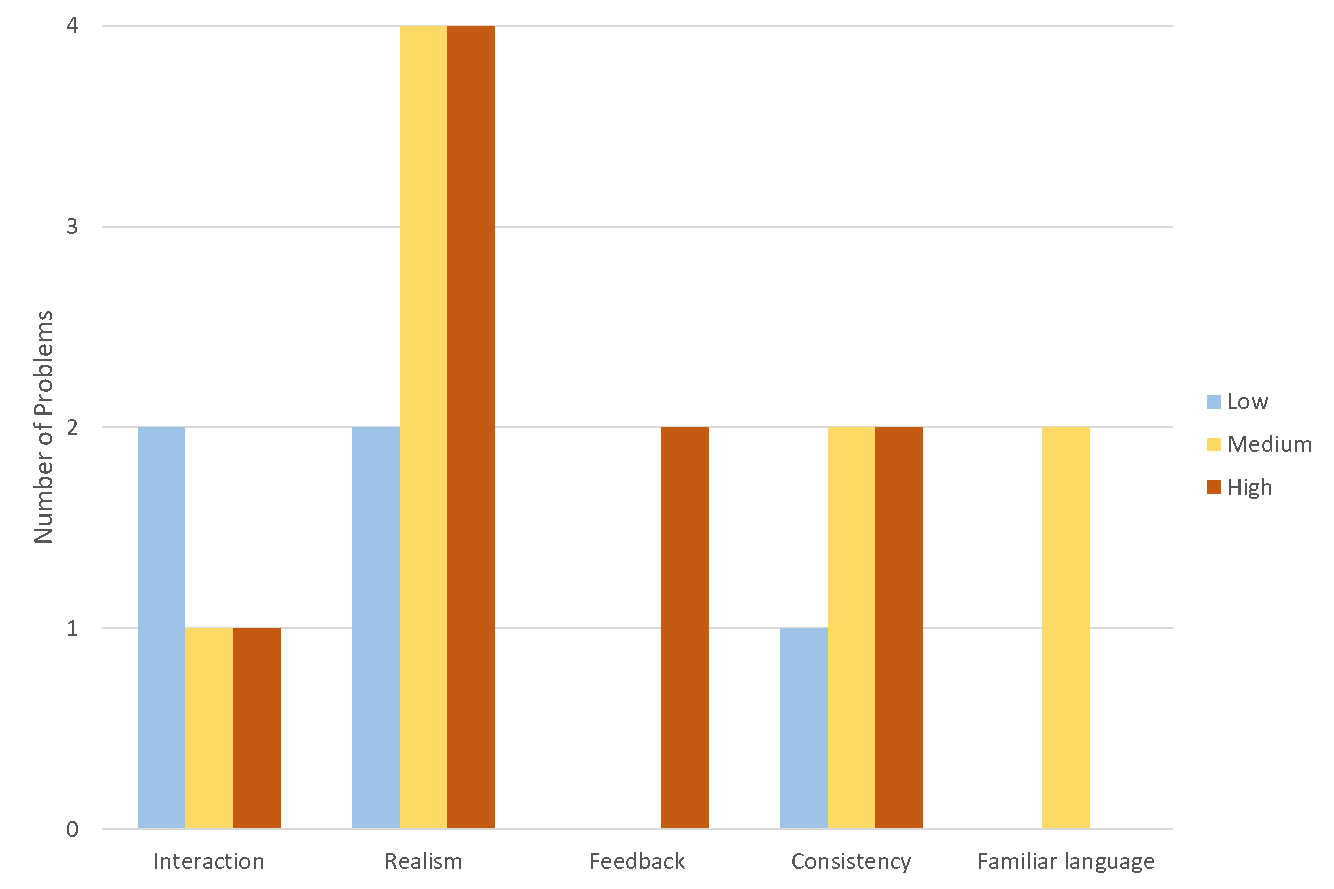 Figure 6: Heuristic evaluation results
Figure 6: Heuristic evaluation results
There was a total of 23 heuristic problems identified after aggregation, with realism having the highest number of problems and familiar language and feedback having the least number of problems.
 Figure 7: Heuristic evaluation fixes From the heuristic problems identified, issues were fixed with focus on problems relating to the interaction and AI features that were implemented. These fixes were done by following the suggested remedial actions and to test if these suggested actions were viable and able to be done in a reasonable amount of time. There were no issues with any of the remedial actions and the problems were tested afterwards to ensure that they no longer occurred.
The heuristic problems can be categorized into those that either are caused by the interaction and AI features or those that are caused by other issues. Of the 23 problems, 11 can be put into this category, with 7 problems arising from interactions, drawn from the interaction, feedback and realism heuristics, and 4 problems arising from AI, drawn from the realism heuristics. Of the seven interaction issues, the two low severity issues and one of the high severity issues were resolved post-testing and all three of the high severity AI issues were resolved.
Figure 7: Heuristic evaluation fixes From the heuristic problems identified, issues were fixed with focus on problems relating to the interaction and AI features that were implemented. These fixes were done by following the suggested remedial actions and to test if these suggested actions were viable and able to be done in a reasonable amount of time. There were no issues with any of the remedial actions and the problems were tested afterwards to ensure that they no longer occurred.
The heuristic problems can be categorized into those that either are caused by the interaction and AI features or those that are caused by other issues. Of the 23 problems, 11 can be put into this category, with 7 problems arising from interactions, drawn from the interaction, feedback and realism heuristics, and 4 problems arising from AI, drawn from the realism heuristics. Of the seven interaction issues, the two low severity issues and one of the high severity issues were resolved post-testing and all three of the high severity AI issues were resolved.
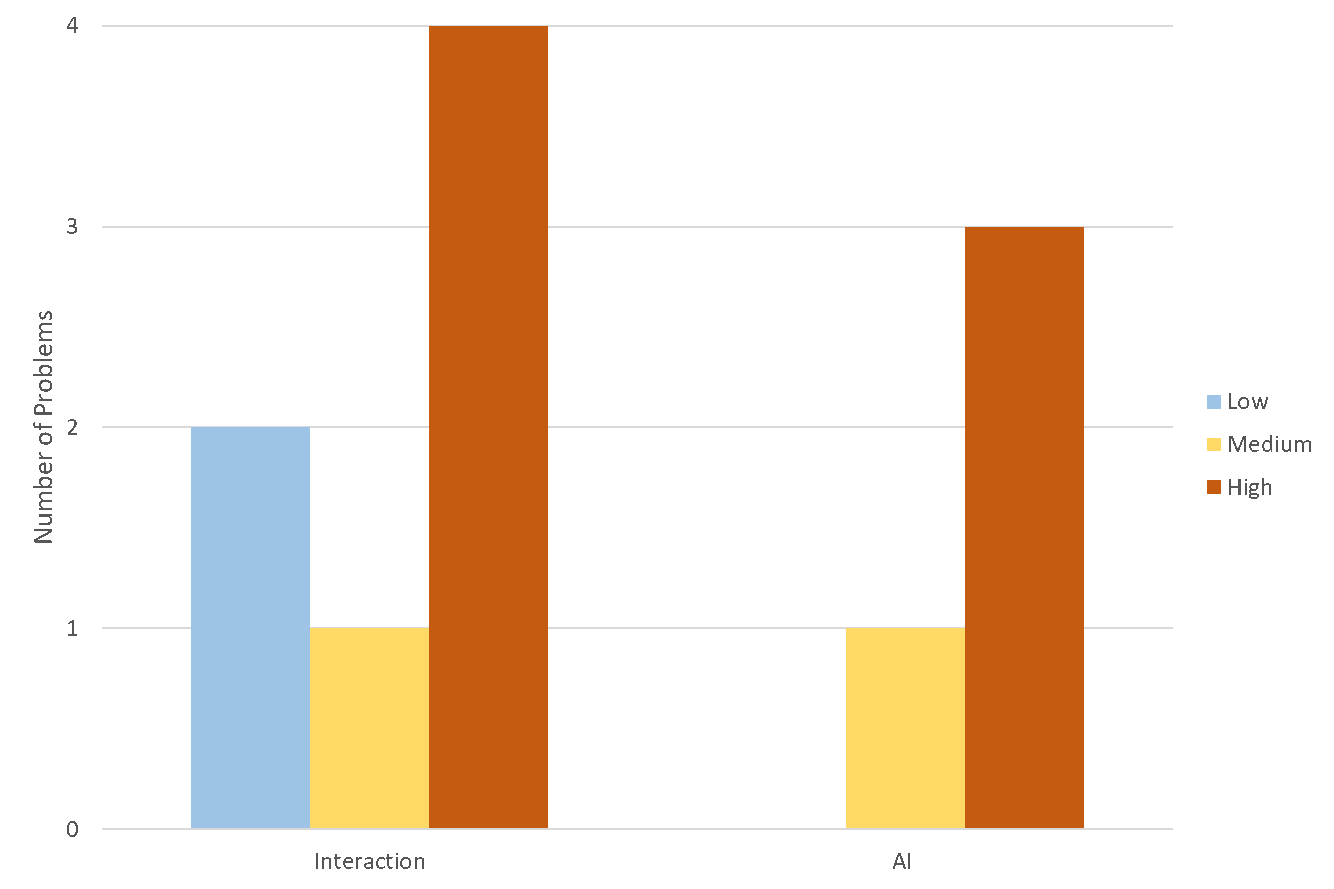 Figure 8: Heuristic evaluation results: Interaction and AI
Figure 8: Heuristic evaluation results: Interaction and AI
One of the issues with heuristic evaluation is that only problems are pointed out in the environment and can make it difficult to assess whether the environment is successful in achieving its goals. The open questions revealed that the environment worked as expected with certain interactions having an effective influence in evoking emotion and forming bonds with the pet. These indicated a clear increase in sadness after the experience, but due to this being done with only the heuristic evaluation, it cannot be used to determine the outcome.
The interaction heuristics did not relate directly to the different levels of interaction but rather to how some of these interactions were carried out throughout the environment, meaning that the environment was successfully able to manipulate the interaction that can take place but that there are ways to make these interactions more natural for the participants. All of the high severity ratings that related to the dog’s AI were resolved, meaning that the dog’s behavior was believable. A variation in the dog’s behavior was not noticeable to the participants and as such, the desired dynamic behavior, while present, had a less successful impact than desired in the environment. This is promising for the environment as it can now be used in future iterations focusing on interaction with a believable AI agent, but if a dynamic AI needs to be the focus of experimentation, more AI changes will need to be implemented.