Introduction
A significant issue with developing height
estimation methods for DEM data is the lack of truth measurements that confirm
the results produced by these methods. In our case, methods that determine
where trees are in an image and predict the ground heights below them lack the
true ground heights to compare the image processing results to.
Recording data such as the ground heights
over a landscape requires expensive equipment or is highly time consuming for
large areas of farmland. For this purpose, we generate our own DEMs digitally
where we can store all the relevant ground and tree data that we need to test
the accuracy of image processing methods such as tree segmentation and ground
estimation.
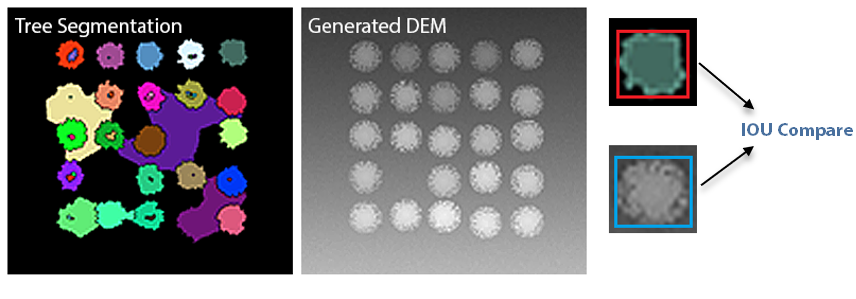
Tree segmentation refers to determining
which pixels in an image belong to a tree object and which pixels belong to
simply ground or other non-tree objects. Tree data in DEMs is represented by
the value of a tree pixel in a DEM image. Ground estimation refers to
predicting the height of the ground where a tree is found. For ground
estimation our produced DEMs showed that interpolation struggles with sharp
changes in the slope angle.
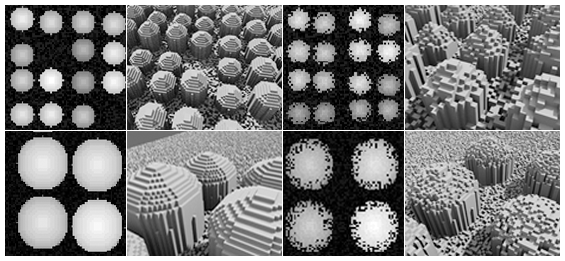
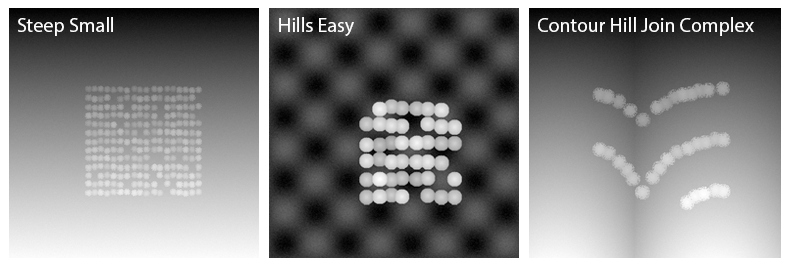
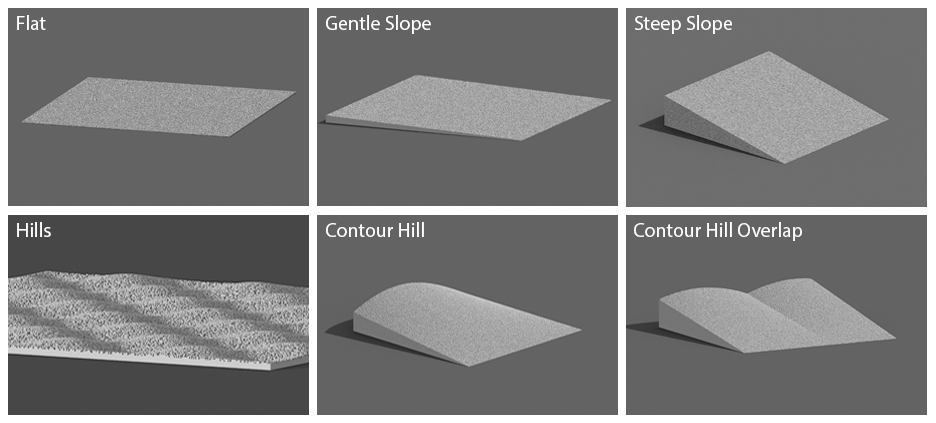
Figure 1: A series of DEMs from 2D and 3D perspectives.