TREEREG

The use of a Point Cloud Registration (PCR) algorithm like Coherent Point Drift (CPD) was considered due to it's potential to provide an accurate registration of input tree detections despite the temporally unstable nature of trees. There are a large number of PCR algorithms avaiable. The most simple and intuitive being Iterative Closest Point (ICP). Thus this was the first algorithm considered. This algorithm involves estimating transformation parameters to minimize the distance between pairs of closest points between the two input point clouds. Due to it's hard correspondence between closest pairs, this method is succeptible to outliers in the data, falls into local minima traps and is incapable of handling non-rigid deformations. Therefore, a second approach had to be implemented to ensure an accurate registration. CPD is a probabilistic approach to PCR. It involves modelling one input point cloud as a Guassian Mixture Model (GMM) and the other as observations of that GMM. Transformation paramters are estimated to maximize the posterior probability that the second point cloud are valid observations of the GMM, providing an accurate registration of the point clouds. Due to it's probabilistic nature, this method is more robust to outliers and unexpected deformations in the input data and can handle non-rigid deformations. Therefore CPD was chosen as the main method to be used in this project. It will be evaluated over a wide range of deformations to the input data, with it's results being compared to both ICP and the current human-based registreation method employed by Aerobotics. From this, it's applicability to the problem domain will be inferred.
The input data used in this project was provided by Aerobotics. It consists of the polygonal tree instance detections for three seperate orchards. Each detection has an associated confidence level indicating the probability that it's a true detection of a real tree. The data provided has been pre-registered by Aerobotic's current human-based method and thus has to be misregistered during the evaluation process.
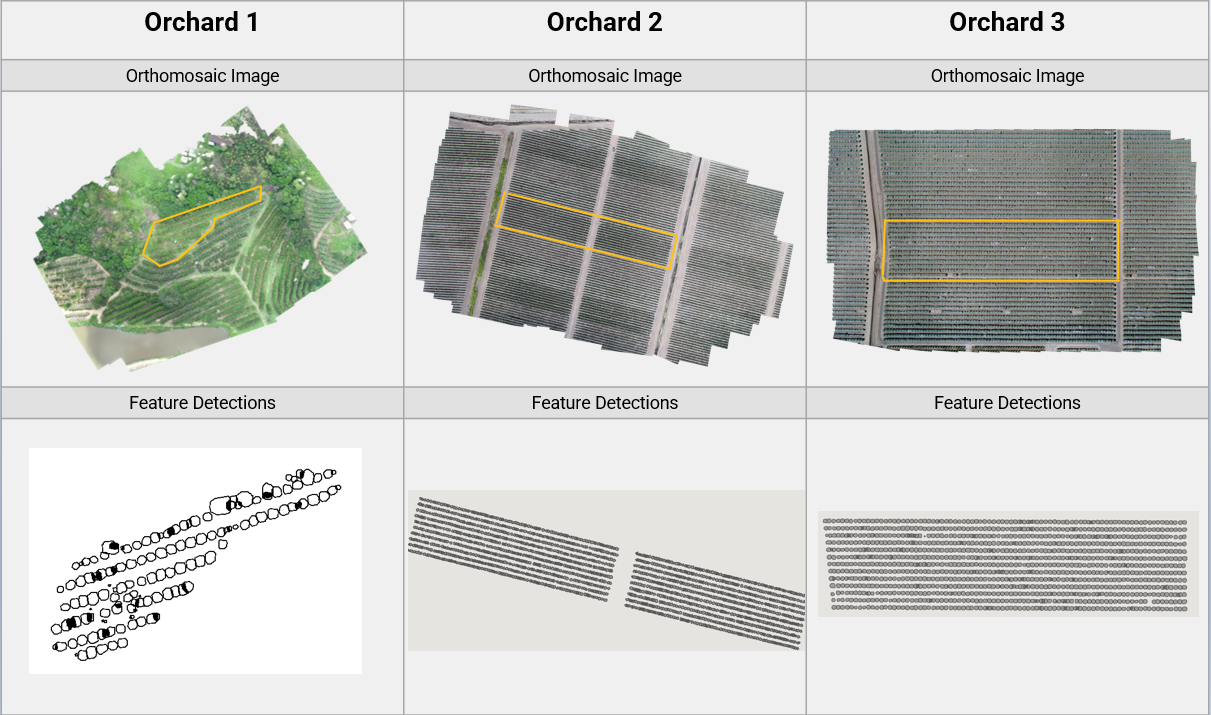
For each of the three orchards, feature detections associated with two seperate surveys of the orchard are provided. Each survey contains the orchard data collected at adifferent date. The goal is to align the feature detections of the later survey on top of the earlier survey using CPD. In order to do this, the centroids of the polygonal detections are taken and used to form the input point clouds. With the reference cloud corresponding to the earlier survey and the source cloud corresponding to the later survey. Transformation parameters to align the source on the reference will be estimated.


Orchard 1 Point Clouds
Orchard 2 Point Clouds

Orchard 3 Point Clouds
The strength of the CPD algorithm will be evaluated on the following bases:
The error metric used to evaluate registration accuracy will be the Mean Squared Error (MSE) of the distance between closest pairs of the two point clouds. A lower MSE means there is less distance between closest pairs of the two point clouds, indicating a more accurate registration.
A visual analysis of registration accuracy will also be used.
The CPD results for each of these tests will be compared to both ICP and the current human-based method at Aerobotics. The MSE of the human-based method will be referred to as the 'Base MSE'.

As seen in the above graphs, CPD is shown to produce accurate results, far better than ICP and coming very close to the Base MSE of the human based method. Showing that it's capable of handling rigid deformations.
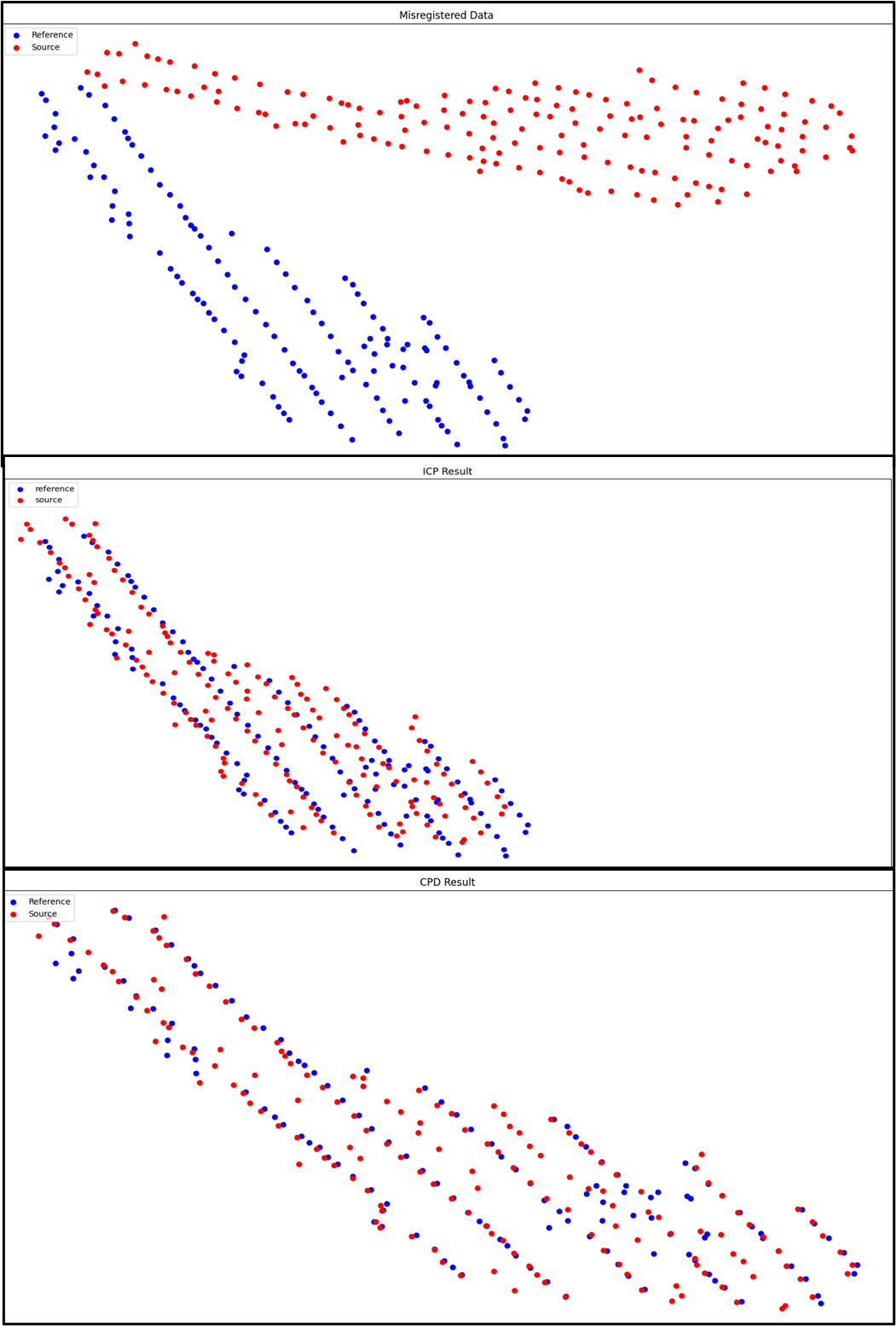
Results for ICP (middle) and CPD (bottom) on orchard 1 dataset (top)
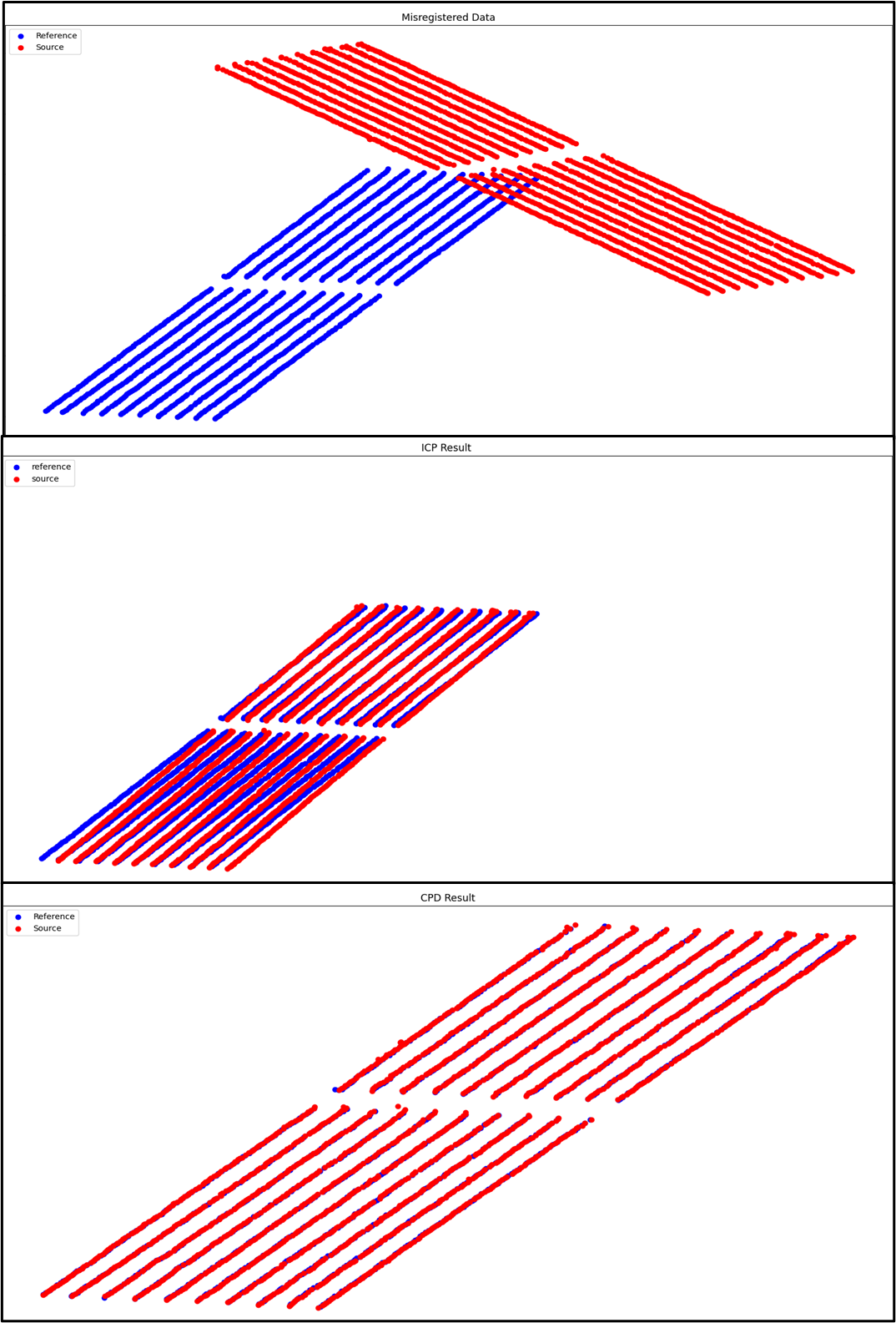
Results for ICP (middle) and CPD (bottom) on orchard 2 dataset (top)
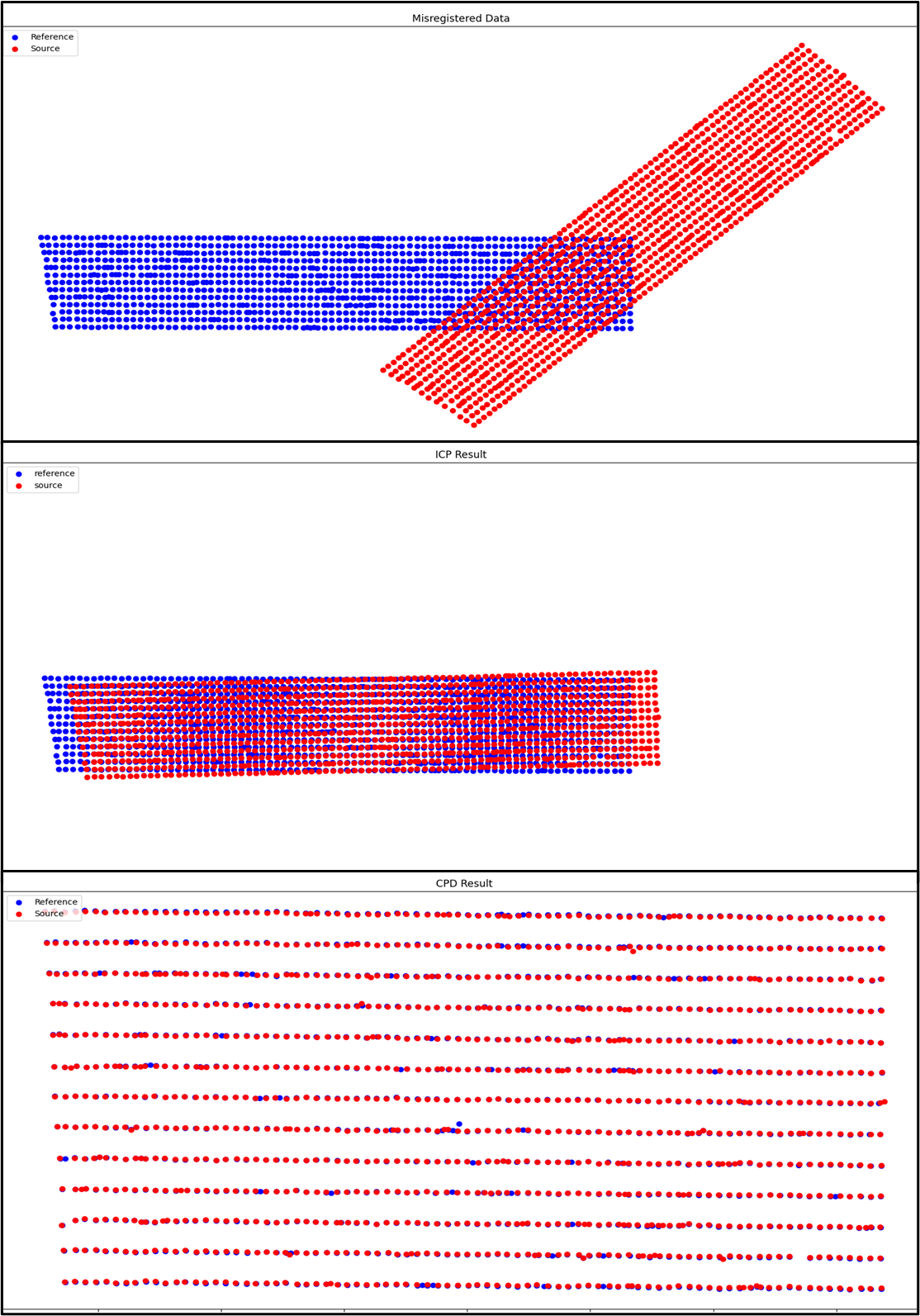
Results for ICP (middle) and CPD (bottom) on orchard 3 dataset (top)
The above figures show the visual registration results of ICP and CPD on each orchard, with the same rigid deformation being applied to all three. CPD is seen to produce visually accurate results.
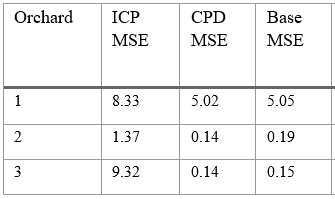
Table with registration accuracy results with the rigid deformation
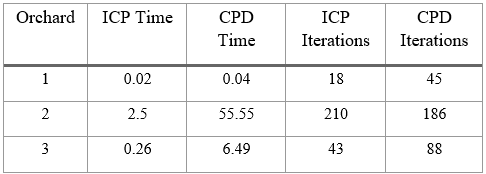
Table with computation time results with the rigid deformation in seconds
The above tables display the numerical results of each algorithm on the data where the previous rigid deformation has been applied. As seen by CPD's low MSE results it provides a much more accurate result that ICP, even slightly beating the human method's base MSE. This increase in accuracy comes with a cost of a higher computation time.


Results for ICP (middle) and CPD (bottom) on noisy orchard 2 dataset (top)
Results for ICP (middle) and CPD (bottom) on noisy orchard 3 dataset (top)
The above figures show the visual results of one of the most important robustness tests on the data, the test of each algorithms robustness to noise and additional outliers. As seen, CPD provides a visually accurate registration despite the added noise.
CPD is shown to outperform ICP on all kinds of rigid deformations. As well as in the cases of unforeseen deformations such as missing data sections and additional noise/outliers. It's shown to produce visually accurate results in these cases, with accuracy levels being extremely close to or beating the human-based method at Aerobotics. Additionally, these methods are produced in a reasonable computation time, with the largest dataset still taking under 1 minute to complete registration. Therefore, we can conclude CPD meets the aims of this project and is capable of registerting the input orthomosaics in the case of rigid deformations on the input data. The testing of this method on more realistic non-rigid deformations is left as future work as we were unable to obtain the necessary raw input data in time. However, based on similar studies, CPD is expected to produce accurate results in these cases too.
created with
Website Builder Software .