Overview
The advent of unmanned aerial vehicles (UAVs) and accompanying aerial imagery has brought a variety of data-driven techniques to the domain of precision agriculture. Of interest is the identification of rows of trees from aerial images of orchard fields. All existing methods for solving this task utilise the Hough transform for straight line detection. Consequently, they all share the same limitation. That is, they perform poorly on curved rows. Furthermore, many of these methods rely on image processing techniques that aren’t robust to varying input images. In this paper, we show that an Ant Colony Optimisation (ACO) algorithm, applied to detections of the underlying shrubs or trees, accurately finds the rows of a given orchard. The proposed method also includes post- and pre-processing to produce final orchard rows. Suitable ACO parameters are chosen and the results analysed for a selection of orchard inputs.
Aims
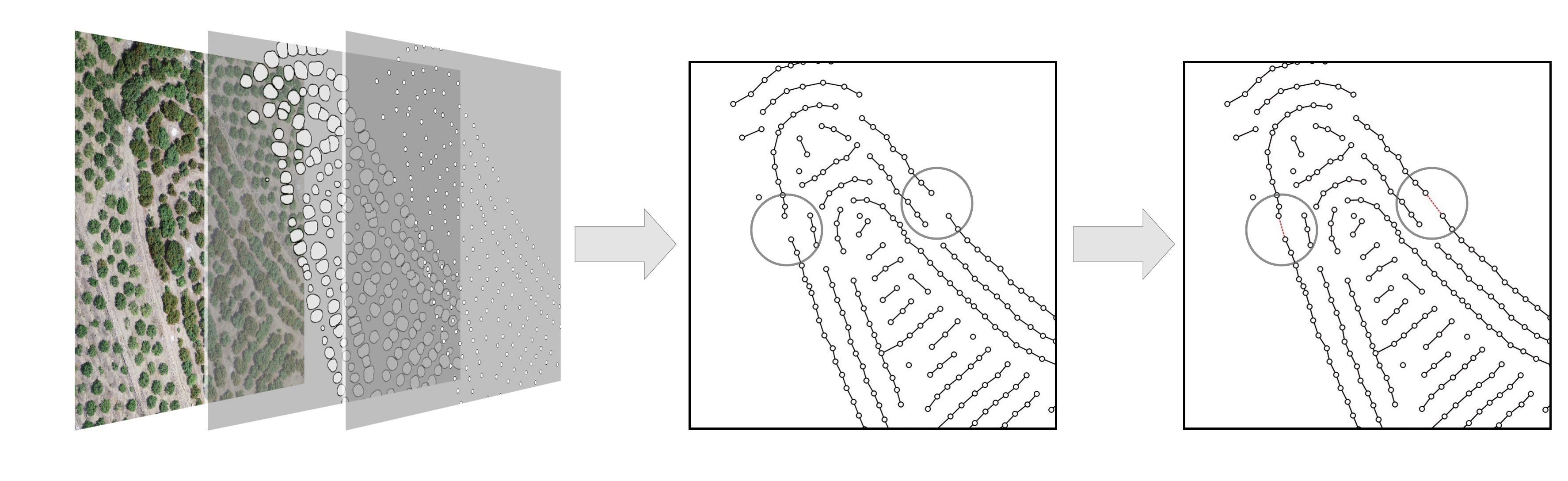
In this paper, we reframe orchard row identification as a combinatorial optimisation problem. This is achieved by treating every tree or shrub in an orchard as a distinct point. Now, instead of detecting rows from pixel data, we are finding rows from a set of points, with each point being the centre of a tree. This reduction in the problem description opens new avenues of exploration, particularly those related to graph structures and graph theory. We propose an Ant Colony Optimisation (ACO) algorithm for finding rows in an orchard. ACO is a well-known technique that is designed for finding good paths through graphs and is thus a perfect candidate for solving this problem. The aim of this research project is twofold:
- To evaluate the feasibility of using the proposed algorithm to find rows of trees/shrubs from aerial images of orchard fields.
- To explore the various complexities of the proposed algorithm, with a specific focus on parameter complexity and computational complexity.

Experimental Setup
The data used in this paper comprises a selection of varying orchard input images. We consider four different orchard inputs with each input portraying a unique set of row and detection characteristics. The selected inputs are ordered by row curvature and detection density, which can be seen in the results section.
We compare the performance of the proposed ACO algorithm on each of these orchard inputs. The evaluation metrics used are precision, recall and intersection over union (IoU). To compute these metrics, we compare model-produced rows against hand-labelled rows. Model and hand-labelled rows comprise a series of edges which are compared for similarity. A true positive (TP) constitutes a model edge that correctly identifies a true edge, a false positive (FP) refers to a model edge that doesn’t correspond to a true edge and a false negative (FN) refers to a true edge that hasn’t been identified by a model edge.
Experiments were conducted on an Asus laptop running Windows 10 x64. The machine has 16.0 GB of RAM and a four core AMD Ryzen 7 CPU with clock speeds of 2.30 GHz.


Performance results of proposed ACO algorithm on orchard input A. Green edge = true positive, red edge = false positive, blue edge = false negative.

Performance results of proposed ACO algorithm on orchard input B. Green edge = true positive, red edge = false positive, blue edge = false negative.

Performance results of proposed ACO algorithm on orchard input C. Green edge = true positive, red edge = false positive, blue edge = false negative.

Performance results of proposed ACO algorithm on orchard input D. Green edge = true positive, red edge = false positive, blue edge = false negative.
Conclusion
In this paper, we explore a novel approach to the problem of orchard row identification in aerial images. The crux of the proposed method is a modified ACO algorithm in which artificial ants traverse graph-representations of orchards to produce optimal paths that represent the rows of trees in those orchards. ACO for orchard row-finding not only modifies the generic ACO algorithm, but also includes newly devised mechanisms specific to this problem domain.
Unlike Hough-based methods, the proposed approach constitutes minimal pre-processing and can reliably identify curved rows of trees or shrubs. Furthermore, experimental results illustrate the robustness of the method to orchards with varying tree density.