Overview
The Multi-objective Depth First Search (MODFS) will identify orchard rows by performing a graph search on the possible combinations of rows which are manufactured from available tree nodes. The first phase comprises of building confident short rows. The second phase extends these short rows by using a depth first search to identify suitable candidate rows to propagate into and continuously searches for new potential rows.
The figure below is an example of the input data of a curved orchard and a potential identified row. The first image is the raw aerial image of the orchard. The middle image contains the tree polygon objects. The right image shows an orchard row in yellow.

Methods
The MODFS algorithm can be split up into two main components. Firstly, the straight-line detection algorithm, which implements a simple Nearest Neighbours search for points that are close together. The rows are formed if they are within the angle constraint of the local orientation of that area. The second component is the Multi-Objective Depth First Search which takes the previously formed rows from the previous component and elongates them. The algorithm selects which nodes to propagate into by selecting the best row out of all the possible combinations, within the angle and distance constraints, according to the lowest objective score.
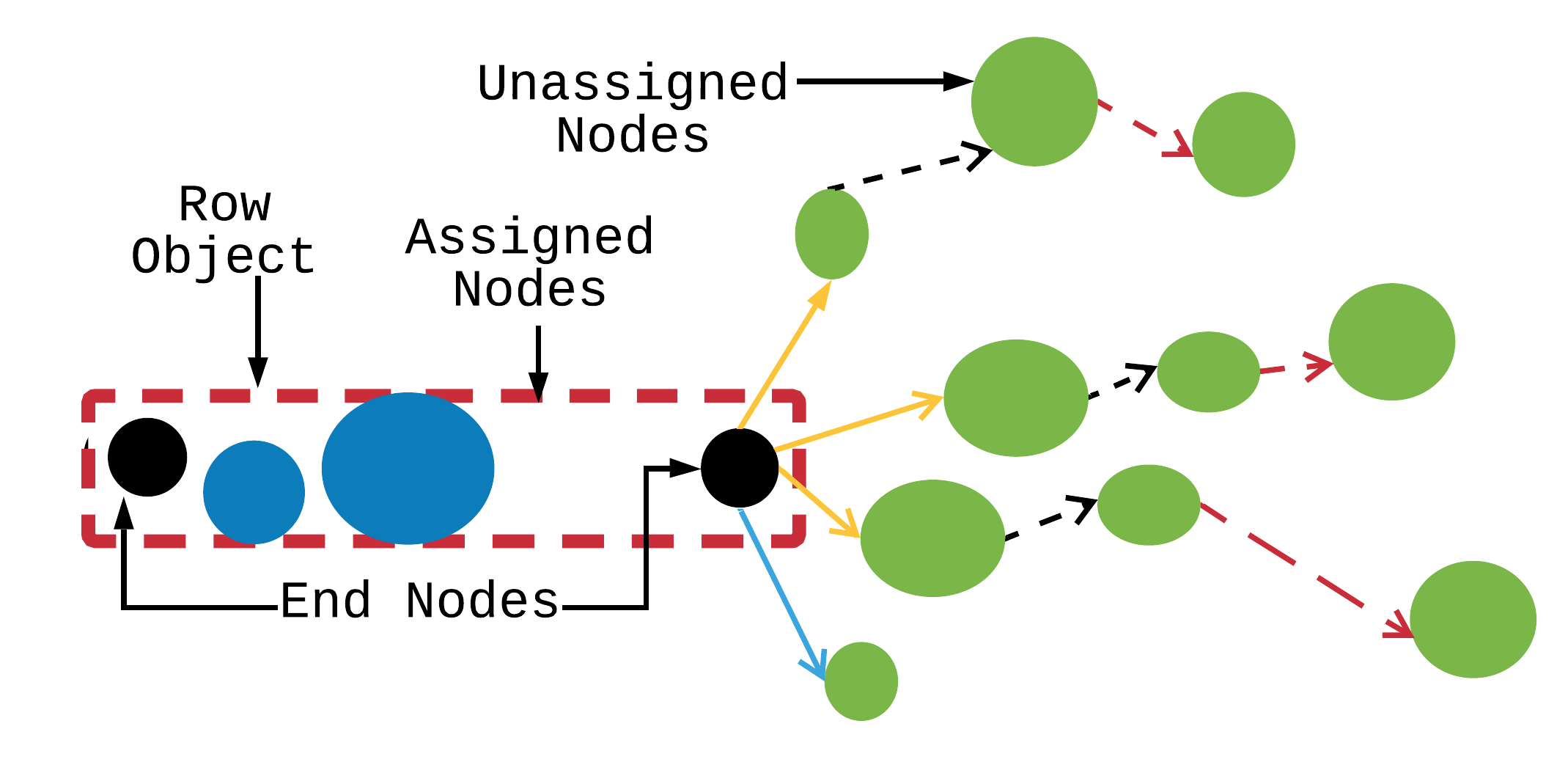
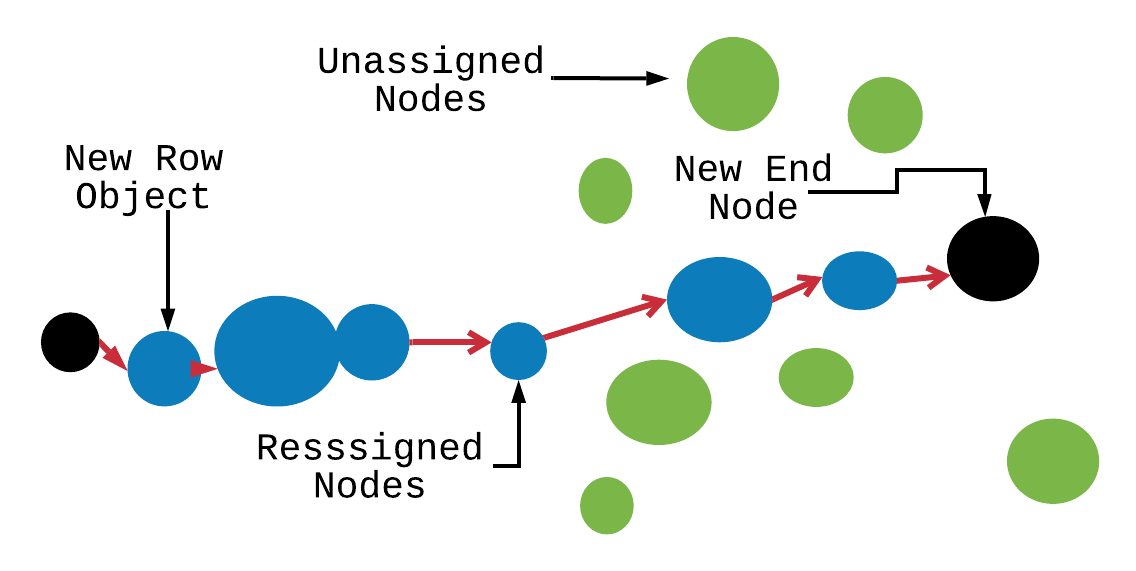
This figure shows the MODFS Tree Selection on the left. The picture on the right shows the row expansion into the selected best row. Black nodes represent row endpoints. Blue and green nodes represent assigned and unassigned nodes respectively. The red dotted line represents the initial orchard row on the left. The red arrows indicate the new orchard row on the right.
Experiment Design
The unlabelled data used in this work can be viewed and manipulated using QGIS. Each orchard input represents information collected via aerial images. The inputs include polygon shape detections, which represent the trees in the orchard. Additionally, each tree has an associated confidence value which indicates how certain the object detector is of the tree’s presence. Furthermore, the inputs include a boundary and a georeferenced image of the selected orchard.
The main qualitative methodology of evaluation will be to compare the rows produced visually by the MODFS approach to the unlabelled data of the orchard rows. Each orchard solution will be judged in multiple categories. These categories serve to show the different aspects of the algorithm and where it may fail. The qualitative score options are good, average, and bad. The categories are:
- How well the overall row structure is captured
- How robustly the perimeter trees are handled
- Predicted Row Length to orchard data
- Frequency of incorrect classifications
- Frequency of missing classifications
Three testing orchards have been used to perform a comprehensive statistical analysis of the results due to hand-labelling of ground-truth rows. This allows for the computation of Precision and Recall of the orchard rows. These metrics were used to perform parameter tuning. Experiments were conducted with a Windows Laptop which has 8.0 GB of RAM, 2 cores and 2.20 GHz of processor power
Results
Parameter Tuning is performed on each of the orchards and optimal values are used to produce results. The resulting images are the outcomes of the MODFS algorithm being executed on the orchards. The results are graded using qualitative measures based on a number of key detection cases
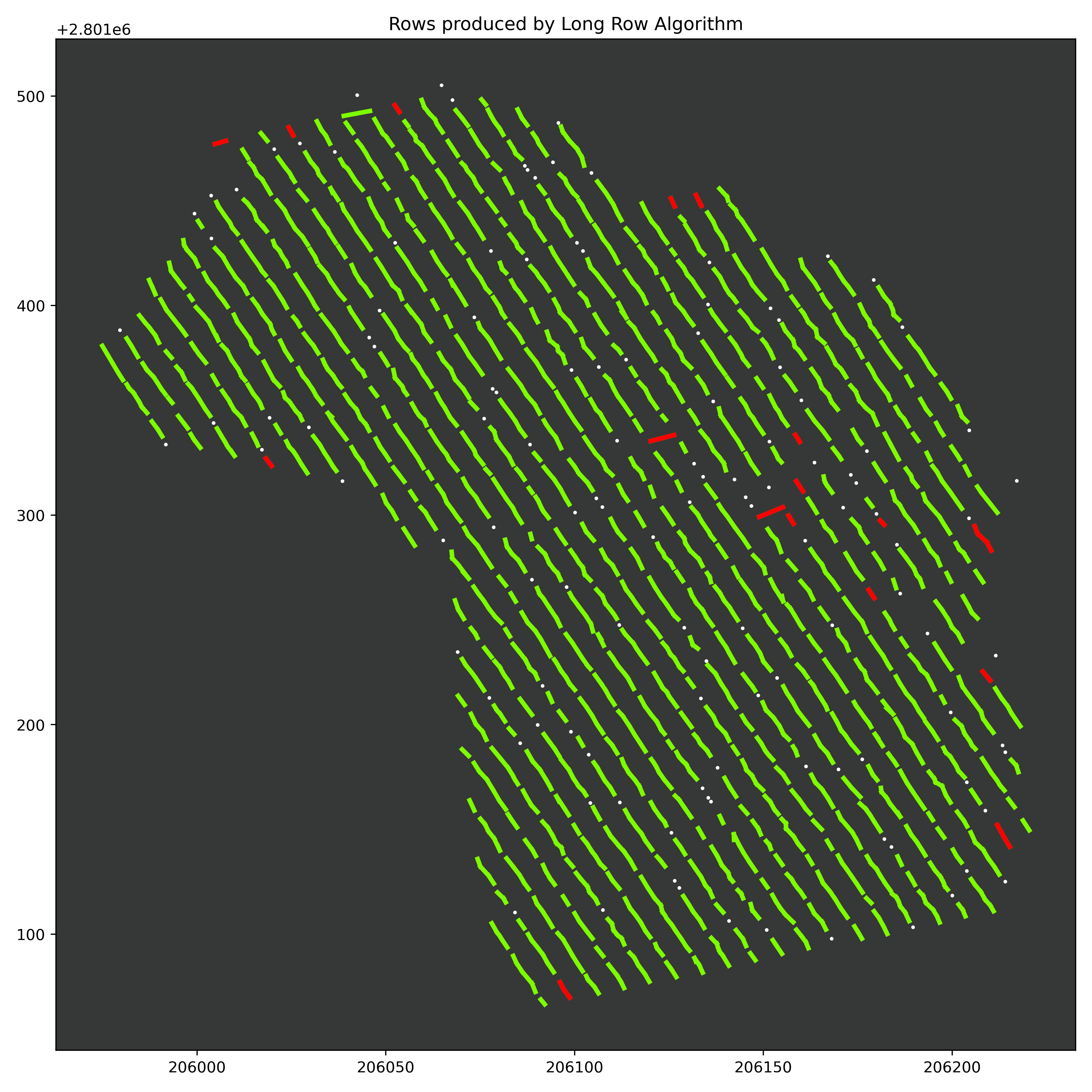
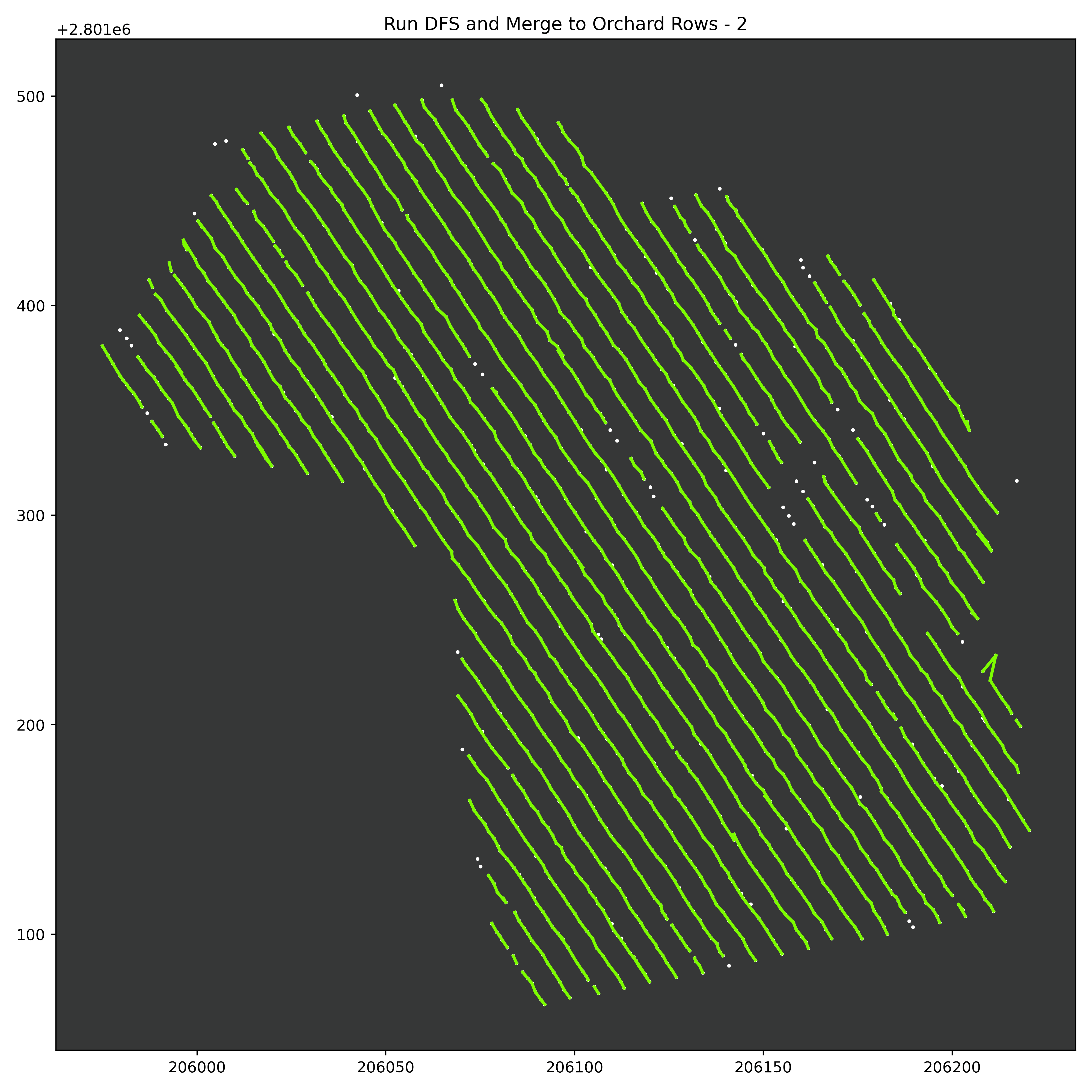
The figure on the left shows the Straight-line algorithm applied to an Orchard. Green lines indicate the predicted short rows and red lines indicate rows that are removed by the post-processing method. The figure on the right shows the MODFS predicted orchard rows. These predictions have a Precision of 73% and a Recall of 64%.
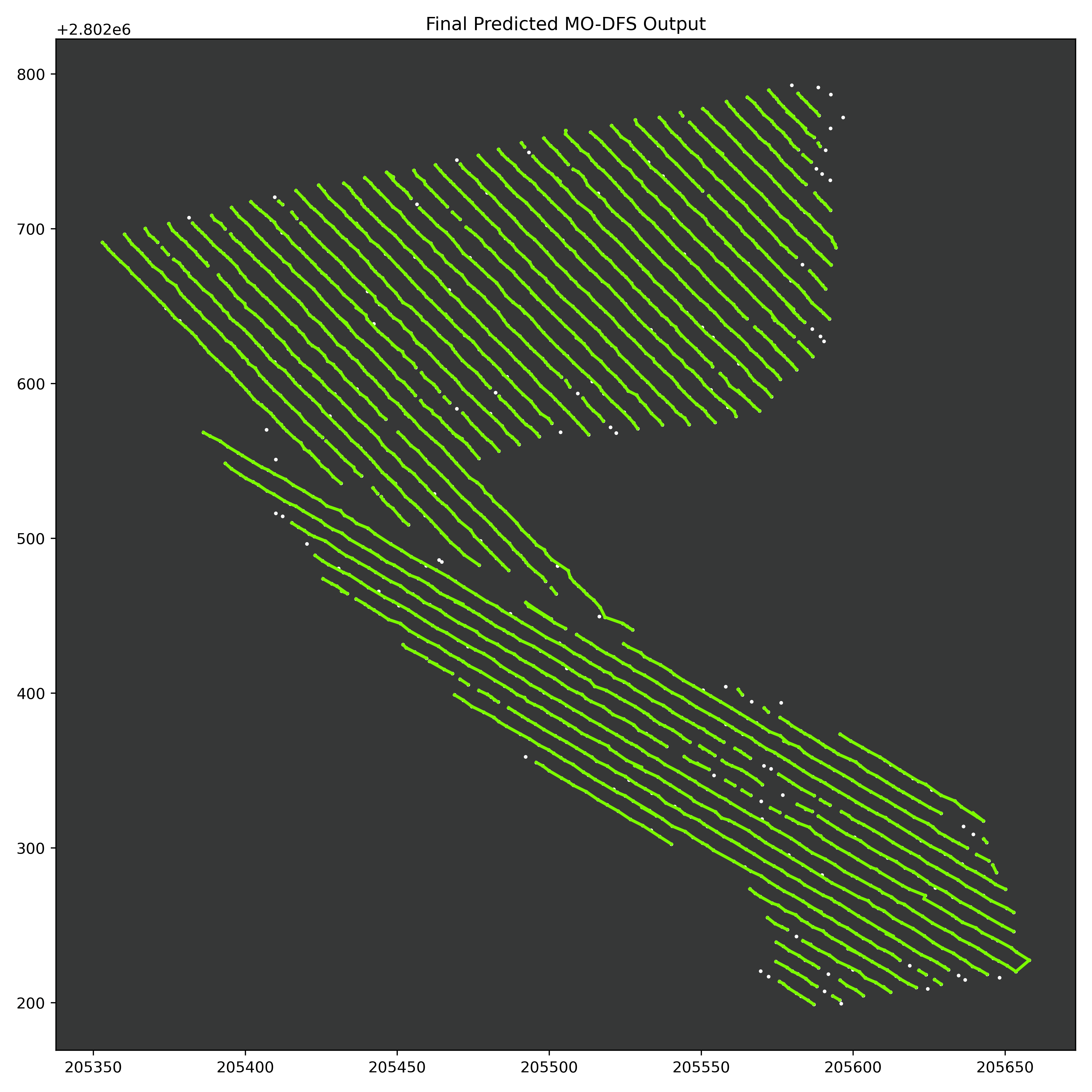
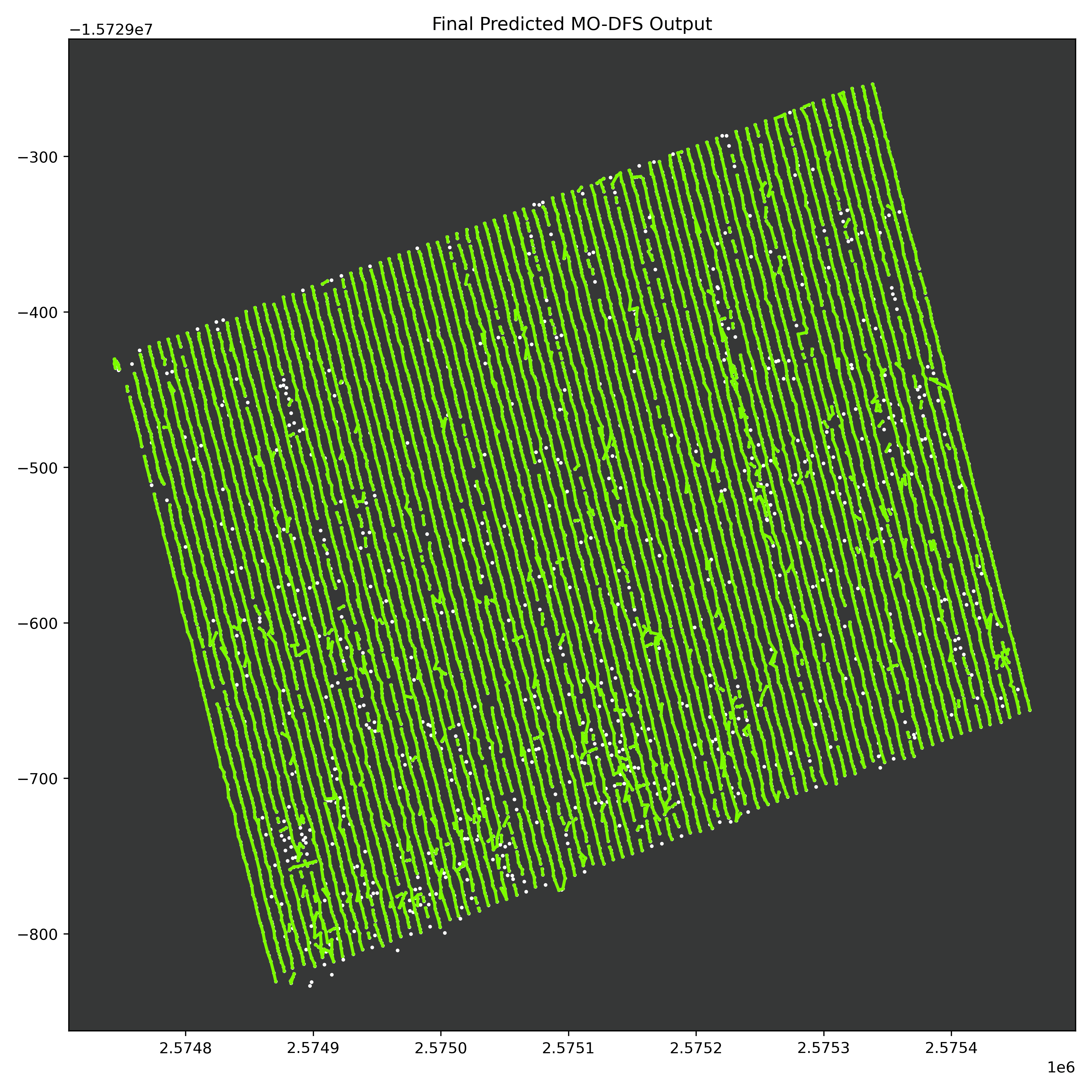
The figure on the left and right show the MODFS predicted orchard rows for orchard 36513 and 43851 respectively. The green lines indicate the predicted rows.
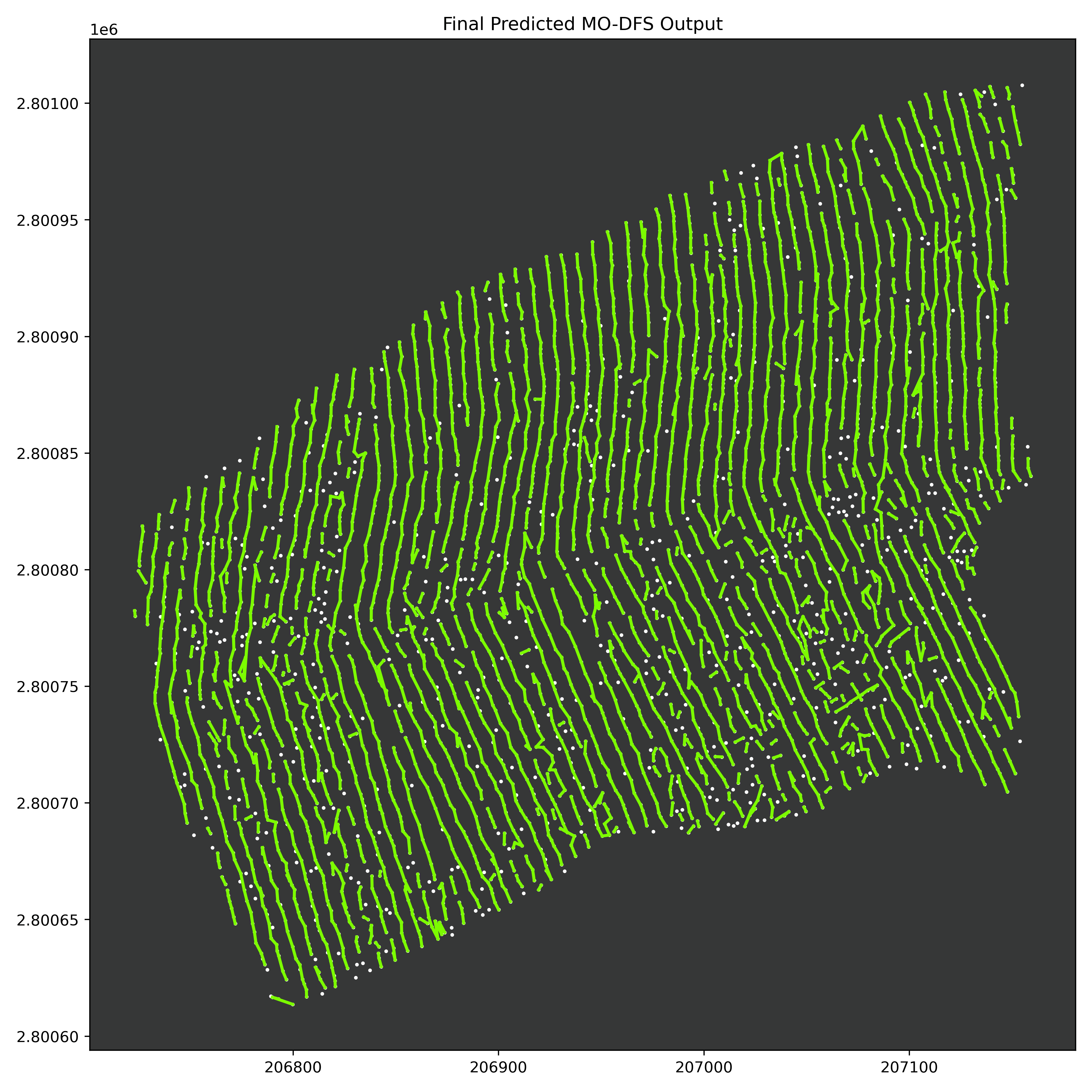
The figure on the left and right show the MODFS predicted orchard rows for orchard 32377 and 36502 respectively. The green lines indicate the predicted rows.
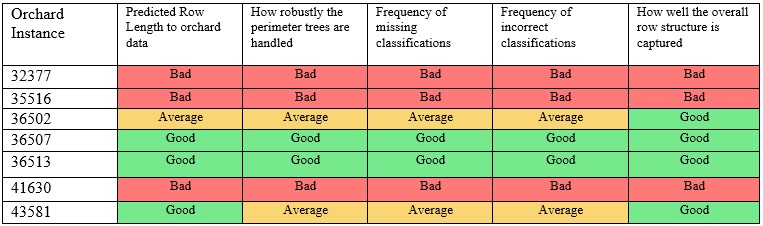
This table shows the qualitative results of the MODFS executed on each orchard.
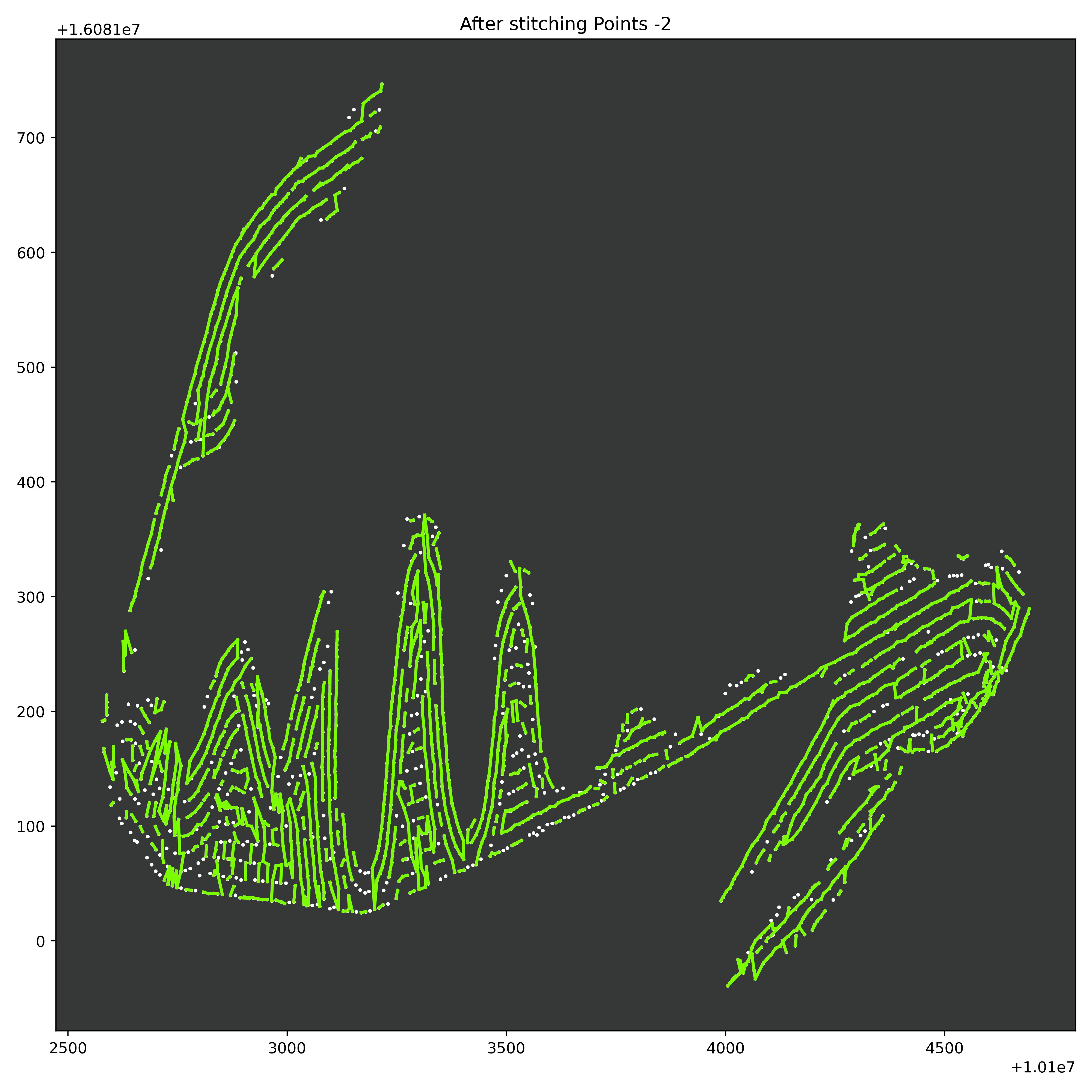
In summary, the MODFS algorithm produces accurately predicted rows for straight uniformly orientated orchards while struggling with orchards that contain dense pockets of trees or sharp curves. The MODFS is adaptable to multi-orientated orchards and will produce robust rows without a fixed global orientation. The algorithm suffers from the inability to allocating all the trees to suitable rows, as it classifies many connections as unfeasible.
Conclusion
The MODFS algorithm is shown to produce sufficiently accurate orchard row predictions for straight and slightly curved orchards. Additionally, the algorithm can adapt to multi-orientated straight orchards and it will produce accurate rows. Unfortunately, orchards which contain very dense or curved trees would result in inaccurate rows which do not capture the underlying row patterns. The rows produced on heavily curved orchards show potential as they partially map the arc of curved rows with a few short segments.
Additional areas where the MODFS may be improved upon include; handling perimeter trees and service tunnels within the orchard, and reducing the number of unassigned trees. Nevertheless, a robust algorithm has been developed, implemented and proven to accurately predict orchard rows for numerous cases. This is shown by the numerous orchard predictions which have visually correct rows, as well as the qualitative metrics which boost statistical confidence in the MODFS’s predictive power. The aims of the project have only been partially met; however, the project has been successfully informative on where the algorithm works correctly and indicates where it can be potentially enhanced.