 A tactile haptic prop created by Riyaadh Abrahams
A tactile haptic prop created by Riyaadh Abrahams

Introduction
The VR Quarterstaff increases immersion by combining both active and passive haptics. It is constructed from a large wooden stick, providing a realistic wooden texture and is fitted with two vibration motors which are connected wirelessly to a VR environment. Haptic pulses from the motors are used to simulate impacts within the game world.
Promo Video
Design & Construction
Main Prop Design
 The shaft of a large wooden spoon was used as a base for the prop. It has a thickness of 3.5cm
and a length of
75cm which is a good approximation of a quarterstaff. It is made out of solid wood which means
it already has quite a
bit of weight to it. 75cm is long enough for two-handed use but not too long so it is less likely
to impact any objects
in the room when swinging it around. A Vive tracker was used to enable tracking on the prop in
VR environments. The tracker
was mounted on the side near the end of the stick. This allows sufficient space for 2 handed use
of the prop.
The shaft of a large wooden spoon was used as a base for the prop. It has a thickness of 3.5cm
and a length of
75cm which is a good approximation of a quarterstaff. It is made out of solid wood which means
it already has quite a
bit of weight to it. 75cm is long enough for two-handed use but not too long so it is less likely
to impact any objects
in the room when swinging it around. A Vive tracker was used to enable tracking on the prop in
VR environments. The tracker
was mounted on the side near the end of the stick. This allows sufficient space for 2 handed use
of the prop.
Electronics Design
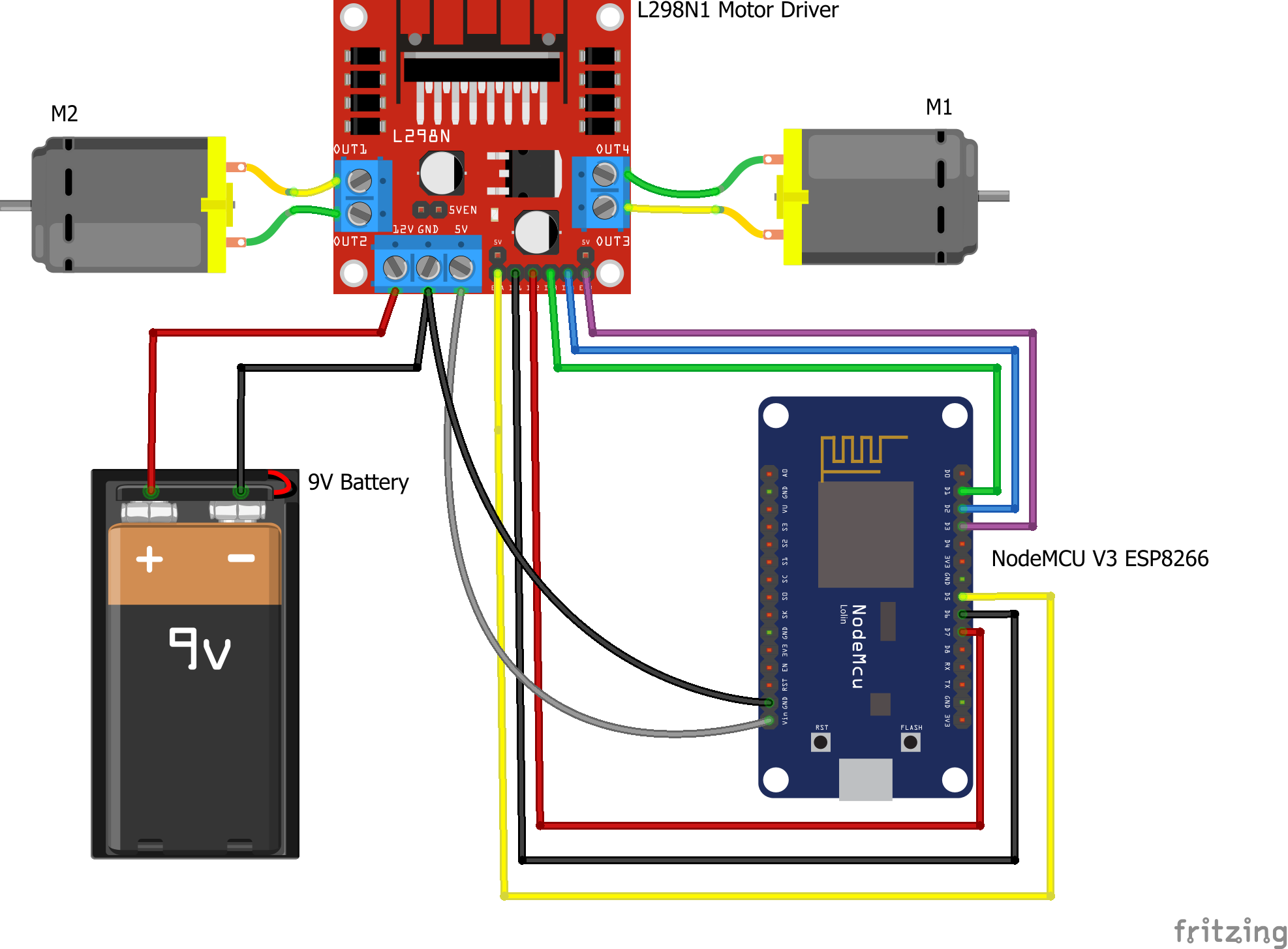
Each side of the stick consists of:
- NodeMCU V3 Micro-controller (Arduino compatible)
- L298n motor driver
- 2 Vibration motors (from a PlayStation 4 controller)
- 9V Battery
The reason for use of a NodeMCU as the micro-controller is that it has built-in Wifi and can be programmed using the Arduino IDE. It is also small enough to easily mount onto the prop. A 9V battery was used as a power source.
The L298n motor driver allows power to safely be distributed to the motors and the micro-controller from the 9V battery. It allows the speed of the motor to be controlled using code.
The micro-controller connects to a local WiFi network and hosts a UDP server. It listens for messages and when received, it fires a haptic pulse. Multiple messages have been configured based on different messages. eg "Hard", "Medium" and "Light". This allows precise control of motor vibrations from any device connected to the same WiFi network.
3D Print Design

It was decided to have a simple cube, with cutouts for each component as well as a cut out for the stick to be attached. This was simple to design using accurate sizes of the components. The more complex the design would mean more iterations would have to be made to fix all the errors. This design was completed in only 2 iterations since it was a single solid object. Holes also needed to be modelled to allow bolts to secure the mount in place.
All the modelling was done in Blender3D which is powerful and open source. Blender has good support for CSG operations that are non-destructive
Virtual Environment

The VR environment is set inside a medieval cathedral. This is an indoor environment with dim lighting. The setting looks like a reasonable scene to be using a quarterstaff. This helps with immersion. The virtual representation of the staff is longer than the actual prop, but due to the haptic shape, it feels like the length is correct. This is due to the weight of the prop as well as the visual feedback of the virtual staff. The gems are brightly coloured and create a particle effect when it is destroyed. A shattered glass sound effect also plays to increase immersion. The most important aspect for the environment design is that it should maximise the feeling of presence. "Presence is defined as the subjective experience of being in one place or environment, even when one is physically situated in another.". We want the user to feel like they are in a different environment. This increases the immersiveness of the game and hopefully increases the fun.
Evaulation & Testing
A heuristic evaluation was done with 3 VR experts, which is enough evaluators to find the majority of the problems. The evaluators 1st played the game using the regular Vive controllers. They then used the haptic prop. All the problems were recorded and were summarized in table 1. Along with the standard heuristic evaluation, the evaluators were asked to point out their general thoughts and any positive aspects of the design.
Results
All the participants were genuinely satisfied with the weight of the prop. One of the evaluators thought the virtual quarterstaff was a bit too short. It was longer than the physical prop and it did feel longer in VR, but we could improve a bit on the exact length. However, the haptic shape illusion was successful. The wooden texture and weight of the prop especially helped in increasing the sense of presence. This was also enhanced by the wooden texture on the virtual prop.
Conclusion
In conclusion, the haptic prop proved to be much better than the Vive controllers when it comes to having a sense of presence. The combination of passive haptics, active haptics, visual and audio feedback as well as an element of focusing on the task at hand all worked together in creating an immersive experience. Evaluators found it not only more enjoyable but also easier and less fatiguing to use a heavier, two-handed custom prop to swing at incoming obstacles. The haptic pulses have a low enough latency to provide a convincing and satisfying feeling of interacting with a virtual world. There are definitely many things that could have been improved, and lots of opportunity for future exploration in this area of study. For example, there is a much better solution for mounting the electronics such that everything is fully enclosed. There could also be a way to adjust the weights of the prop as needed to create a longer virtual representation. Overall, the results proved successful.